import os
import time
import json
import eventlet
eventlet.monkey_patch()
from flask import render_template
from flask import Flask, render_template, Response
from flask_socketio import SocketIO
import paho.mqtt.client as mqtt
import cv2 # ← new
# — Flask / Socket.IO setup —
app = Flask(__name__)
app.config['SECRET_KEY'] = 'rc-car-secret'
socketio = SocketIO(
app,
async_mode='eventlet',
cors_allowed_origins="*",
logger=True,
engineio_logger=True
)
@app.route('/phone')
def phone():
# renders the phone broadcaster template
return render_template('phone_loc.html')
# — MQTT setup (unchanged) —
MQTT_BROKER = os.getenv('MQTT_BROKER', 'broker.hivemq.com')
MQTT_PORT = int(os.getenv('MQTT_PORT', '1883'))
TOPIC_INPUT = 'myrc/car1/input'
mqttc = mqtt.Client()
mqttc.connect(MQTT_BROKER, MQTT_PORT, keepalive=60)
mqttc.loop_start()
# — Gear & smoothing (unchanged) —
GEAR_SCALE = [0.0, 0.10, 0.3, 0.5, 0.7, 1.0]
SMOOTH = 0.2
steer_smooth = 0.0
throttle_smooth = 0.0
scale_smooth = GEAR_SCALE[1]
# — Camera capture setup —
# 0 = default webcam. Change to RTSP/MJPEG URL for IP cams or "http://:8080/video"
camera = cv2.VideoCapture("http://100.83.193.15:8080/video")
if not camera.isOpened():
raise RuntimeError("Could not start camera.")
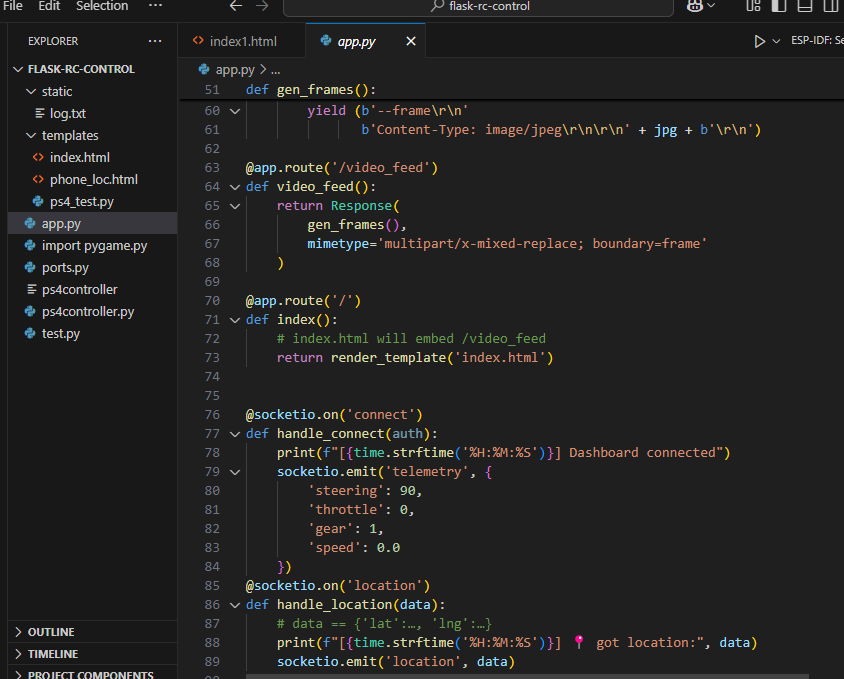
def gen_frames():
"""Yield camera frames as multipart MJPEG."""
while True:
success, frame = camera.read()
if not success:
break
# optionally: resize, flip, overlay etc here
ret, buffer = cv2.imencode('.jpg', frame)
jpg = buffer.tobytes()
yield (b'--frame\r\n'
b'Content-Type: image/jpeg\r\n\r\n' + jpg + b'\r\n')
@app.route('/video_feed')
def video_feed():
return Response(
gen_frames(),
mimetype='multipart/x-mixed-replace; boundary=frame'
)
@app.route('/')
def index():
# index.html will embed /video_feed
return render_template('index.html')
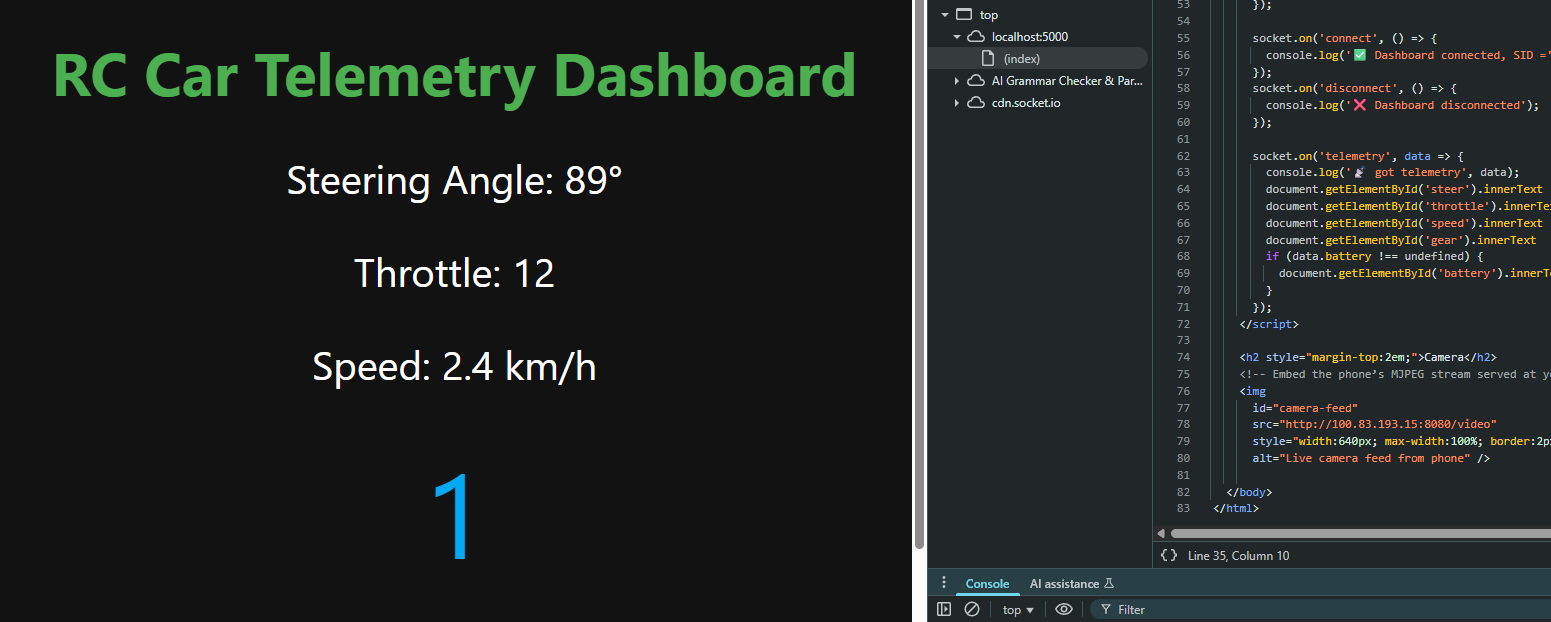
@socketio.on('connect')
def handle_connect(auth):
print(f"[{time.strftime('%H:%M:%S')}] Dashboard connected")
socketio.emit('telemetry', {
'steering': 90,
'throttle': 0,
'gear': 1,
'speed': 0.0
})
@socketio.on('location')
def handle_location(data):
# data == {'lat':…, 'lng':…}
print(f"[{time.strftime('%H:%M:%S')}] 📍 got location:", data)
socketio.emit('location', data)
@socketio.on('controller_input')
def handle_input(data):
global steer_smooth, throttle_smooth, scale_smooth
# (your existing smoothing, MQTT publish, telemetry emit…)
raw_steer = data.get('steering', 0.0)
raw_thr = data.get('throttle', 0.0)
raw_brk = data.get('brake', 0.0)
gear = data.get('gear', 1)
steer_smooth += SMOOTH * (raw_steer - steer_smooth)
angle = int((steer_smooth * 0.5 + 0.5) * 180)
forward = -raw_brk if raw_brk > 0.1 else raw_thr
throttle_smooth += SMOOTH * (forward - throttle_smooth)
target_scale = GEAR_SCALE[gear]
scale_smooth += SMOOTH * (target_scale - scale_smooth)
pwm = int(throttle_smooth * scale_smooth * 255)
payload = {'angle': angle,'pwm': pwm,'gear': gear}
mqttc.publish(TOPIC_INPUT, json.dumps(payload), qos=0)
speed = abs(pwm) * 0.2 * gear
socketio.emit('telemetry', {
'steering': angle,
'throttle': pwm,
'gear': gear,
'speed': round(speed,1)
})
@socketio.on('restart_esp')
def restart_esp():
# your code to reset ESP (e.g. serial command or MQTT)
print("ESP restart requested")
@socketio.on('restart_hotspot')
def restart_hotspot():
# your code to cycle the Android hotspot
print("Hotspot restart requested")
if __name__ == '__main__':
print("Starting server on http://0.0.0.0:5000/")
socketio.run(app, host='0.0.0.0', port=5000, debug=True)